

In this lab you will use the polling concept for a JTAG UART (Universal Asynchronous Receiver/Transmitter that sends data over the JTAG programming cable) to control a simple game. To poll a device is to actively and continuously check its status to see if it is ready to be used in some way.
We will provide the Car World game running on a PC. In this game, a car is driven around a race track in order to finish laps as fast as possible without driving off the track. Your task is to write a Nios II assembly program that will control the car (without human intervention). The Nios II program you write will communicate with the Car World game over the JTAG UART I/O device. Your program can query the state of the sensors, speed of the car, and current position on the map. Your program must then send acceleration and steering commands to drive the car.

The goal of the Car World game is to guide the car around the track, trying to complete laps as quickly as possible. If the car drives off the track (or F3), the car will reset to the starting point of the track. Below is a screenshot of the default view of the Car World game (on the left), as well as a screenshot of an alternative view (on the right), accessible through pressing F2.
The car has five sensors in front. These sensors indicate whether the car is approaching the edge of track. For example, on the screenshots above, the leftmost sensor (coloured red) is reporting that it is currently off the track, while the other four sensors (coloured green) are on the track. Your assembly program will need to read the state of these sensors in order to make an informed decision on moving the car. You can also read the current speed of the car and its current position (x, y, and z coordinates).
To move the car you need to inform the Car World game of the desired steering and the acceleration/deceleration. The text in the Car World window reports the current status of the car to help debug your program. To summarize, you are to write a Nios II assembly program that will continuously:
However, bragging rights will be given to the group with the best time. Try to optimize your code and have some fun while doing it!
Communication between the Car World game and Nios II will use the JTAG UART I/O device. A UART allows a bidirectional stream of bytes to be transferred across some medium, in our case, the JTAG programming cable. A byte you send to the UART will be received by the game on the PC, while a byte sent by the game will be available for you to read.
The documentation of the JTAG UART can be found here.
The JTAG UART documentation describes how to receive or send bytes of data. Now we proceed on describing the communication protocol for the Car World program that you will use to communicate with the game.
The communication protocol for the Car World program consists of reading and writing packets of data over the JTAG UART. A packet that consists of multiple bytes must be read/written from/to the JTAG UART one byte at a time, and you must implement polling for each packet byte. The first byte of every packet is always the packet type. Packet types range from 0 to 5 and are in the details described below. The packet length depends on the type of packet being sent.
There are in total 4 transmit packet types. These packets are sent by your program running on the Nios II to the Car World game.

To get the current state of the sensors and car's speed, send
a one-byte command with value 0x02. The Car
World game will respond by sending you a sensor and speed data packet (type 0),
described below.

In order to get car's position, send a one-byte command with
value 0x03. The Car World game will
respond by sending the position data packet (type 1).

To change the acceleration of the car, send a two-byte command to
Car World. The first byte (command type) is 0x04, while
the second byte should be the desired acceleration formatted as a 8-bit
signed number. The acceleration ranges from -127 (full deceleration) to
+127 (full acceleration ahead). It is important to note that an acceleration
of 0 does not mean that the car will not be moving; rather, the car will
continue to move at its current speed. If the speed reaches zero and you
continue to apply a negative acceleration, the car will start moving in
reverse. The Car World game
sends no response on receiving a packet of this type.

Similarly, changing steering uses a two-byte command.
The first byte (command type) is 0x05,
while the second byte should be the desired steering amount formatted as a 8-bit
signed number. The steering amount ranges from -127 (hard left turn)
through 0 (straight ahead) to +127 (hard right turn). The Car World game
sends no response on receiving a packet of this type.
There are 2 packet types that are sent by the Car World game as a response to transmit packet types described above.

On receiving a packet of type 0x02, the Car World game sends 3 bytes to
the JTAG UART. The first byte is 0x00, while the
other two bytes represent the current value of sensors and the
current speed of the car, respectively. The layout of sensor data is
shown above. "On the track" sensor state is indicated by a value of 1
and "off the track" state is indicated by a value of 0. For example,
the value of the sensor data in the screenshots shown earlier
is 0x1e.
The speed is an 8-bit unsigned number, ranging from 0 (stopped) to 255 (full speed). Note that this is not the velocity of the car, as it only describes how fast the car is moving and not in what direction the car is moving.

A position data packet consists of 4 bytes, sent by the Car
World game as a response to a packet of type 0x03. The
first byte is 0x01, while the remaining 3 bytes
are 8-bit signed numbers representing x,y, and z coordinates,
respectively. You are not required to use position data but
they may be useful for completing the more difficult tracks.
Below is a snippet of pseudo-code showing two subroutines for reading sensor and speed data and adjusting steering.
OnePossibleAlgorithm:
call ReadSensorsAndSpeed()
# Decide what to do
if sensors are 0x1f
call SetSteering to steer straight
else if sensors are 0x1e
call SetSteering to steer right
else if sensors are 0x1c
call SetSteering to steer hard right
else if sensors are 0x0f
call SetSteering to steer left
else if sensors are 0x07
call SetSteering to steer hard left
else
Hope this doesn't happen
# Also do something about the speed.
...
ReadSensorsAndSpeed:
# Request sensors and speed: Send a 0x02.
call WriteOneByteToUART(2)
# Read the response
call ReadOneByteFromUART()
check that data read is 0
call ReadOneByteFromUART()
look at sensor states
call ReadOneByteFromUART()
look at current speed
return
SetSteering:
call WriteOneByteToUART(5)
call WriteOneByteToUART(new_steering_value)
return
|
car_world.bat. This will:
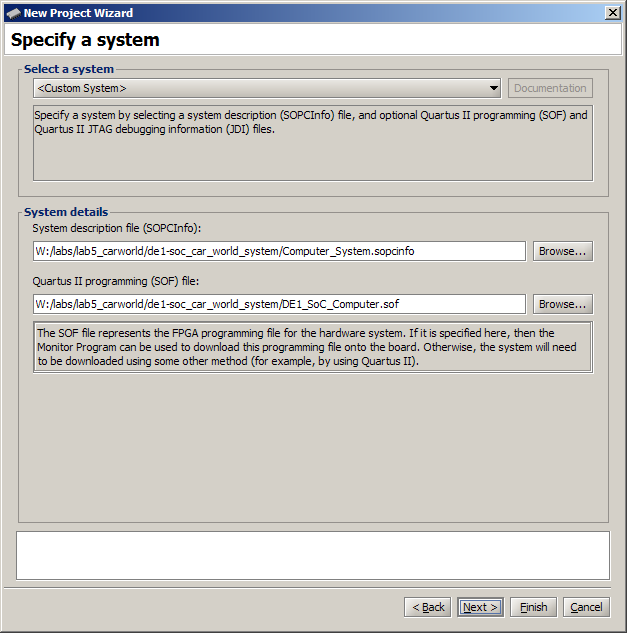
<Custom System>, and specify
the Computer_System.sopcinfo and DE1_SoC_Computer.sof files
provided in the
directory lab5_carworld/de1-soc_car_world_system directory, as
shown in the figure below. Leave all the other fields blank.
For program type, specify the Assembly Program type, and
add the assembly file you wrote that will control the Car World
game.
When asked whether you wish to download the computer system onto the FPGA board, choose No. The
car_world.bat batch file already does this for you.
To do these steps outside of DESL labs, besides having Altera Quartus and Altera Monitor program installed, you will need the DE1-SoC board attached to your computer via a USB cable. If you don't have the board at home, you still must write the required Nios II assembly code and ensure that it at least compiles. For this, skip the first step and just compile your code after completing step 2.
You may also test your interactions with the game using the Nios II simulator. It won't talk to the game, but it will respond to the acceleration, steering, and get sensors/speed/position commands, so you can at least test the basic interactions with the game.
0x00?0x05
followed by 0x9C. What is the meaning of this
information?Be prepared to explain
Demonstrate your working game. In the
directory lab5_carworld/carworld/data/Landscape there are
multiple tracks labelled for various difficulty levels (easy, medium,
hard, and extreme). To change a track:
Actions/Disconnect.
car_world.bat
lab5_carworld/carworld/data/Landscape and
copy the desired track file over the file landscape.txt.
For example, copying landscape_medium_hill_valley.txt
over landscape.txt will switch to the medium track.
car_world.bat again and
select Action/Load option in the Altera Monitor program.
landscape_hard_hill_valley track under 46 seconds.
Your TA will record your best lap time on landscape_hard_hill_valley. Don't forget to submit your code.
For submission, put all of your code in a single assembly file called lab5.s and submit it on blackboard.
0x00 to the JTAG
UART in case Car World is waiting for a multi-byte packet.
Car World treats excess 0x00 commands as a no-op.
Memory tab,
go to the memory address 0x10001020, check
the Query Memory Mapped Devices check-box and click
the Refresh button. Then uncheck the check-box.
This is equivalent to reading the UART receive FIFO data until the FIFO is empty.